I am also looking at designing a TMC2208 driver board mod for the Cetus3D MkII and wanted to know specs for each of the steppers including the extruder.
I reached out to “Moon’s Steppers” with a picture of their stepper on the MkII and the response I received was underwhelming.
I’m chasing coil specs, current limits and steps / revolution / step angle.
I don’t want to replace the steppers, I want the specs so that I can properly design and build a TMC2208 replacement board for each axis. Moons told me to contact TierTime for the specs.
Steppers don’t care about microstepping, only stepper driver and slicer does. But yes, you have to match the microstepping of the original drivers to replace them with TMC.
Biggest “problem” with the motors is the extremely high inductance, at least on the UP! series this is 30mH, and that makes a bad combination with trinamic unless you can crank up the voltage a little.
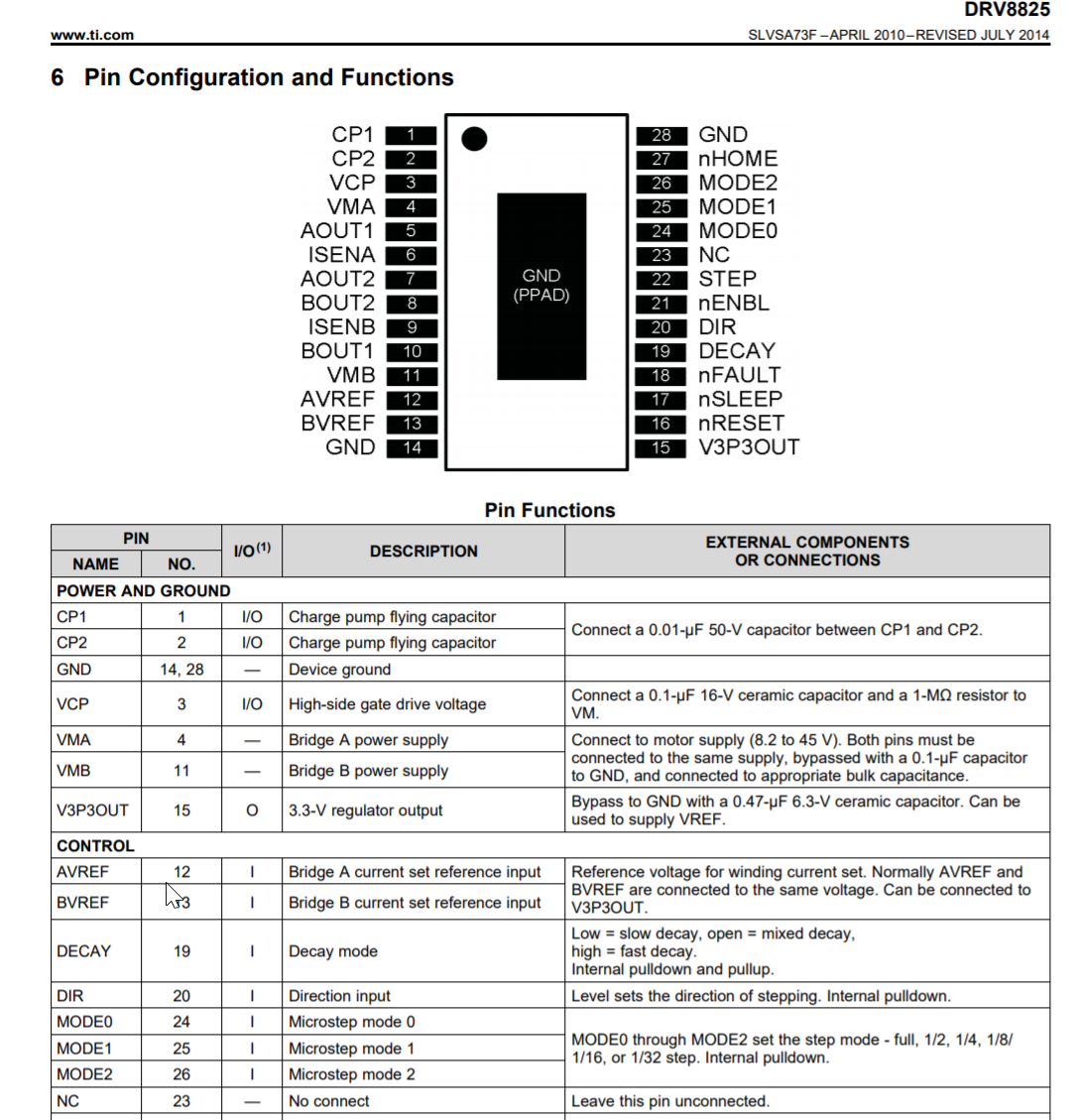
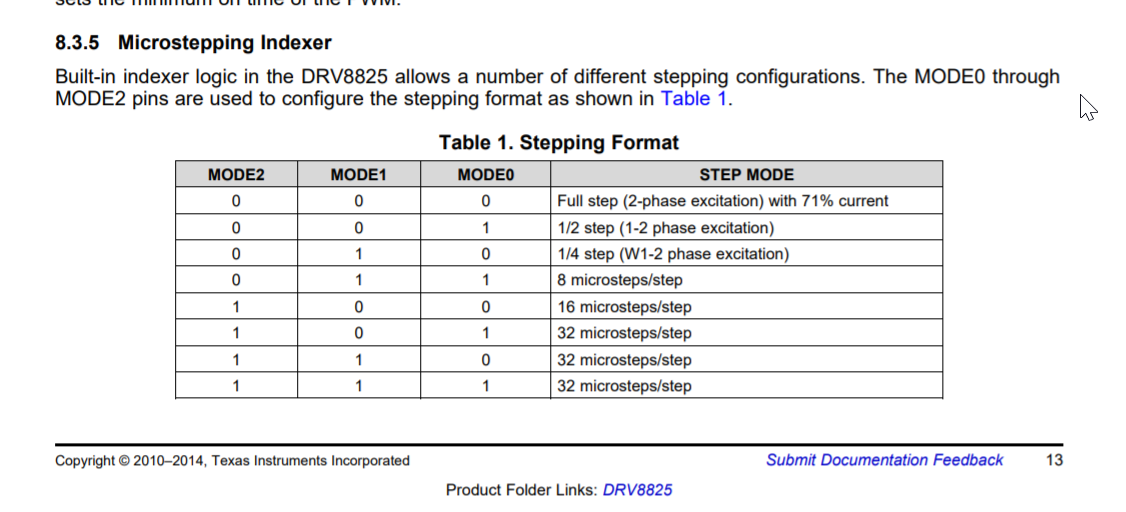
If you can supply custom g-code and measure the step/dir pulses you can work out the microstepping and steps/mm that way. Or if your Cetus has the “dumb” drivers configured by microstepping pins you can just look at the datasheet and determine which pins are tied high/low to find the microstepping that way instead.
Curious to see what your ideas on intercepting the step/dir/en signals are? Stackable headers between the CPU board and Main board, soldering to pins or headers?
I contemplated doing something similar but I chose to replace the all the electronics to free up the choice of slicer as well as silent electronics.
Further reading seems to indicate you skip the tiny85 if you connect the drivers to a usb-ttl serial port and use https://learn.watterott.com/silentstepstick/configurator/ to set OTP bits
(although a $1 tiny85 doesn’t really break the budget on such a project)
You can set the StealthChop/SpreadCycle modes by OTP memory write, but the microstep resolution not: TMC2208 Datasheet 5.4.1 CHOPCONF – Chopper Configuration: MRES bits
I use a TinyFab CPU on my mk2. In the Smoothieware (firmware used on TinyFab) we need to define the steps per mm. These are the working settings on mine. Note that I had to measure only extruder by measuring the extruded filament. But I have printed many engineering samples as well as many parts for cetus itself (e.g. this Y end stop,3D touch bed sensor holder or this Dual duct for Cetus) on mine, and always get exact measurements. So I can confirm that Extruder motor is different from xyz motors.
# Arm solution configuration : Cartesian robot. Translates mm positions into stepper positions
alpha_steps_per_mm 160 # Steps per mm for x stepper
beta_steps_per_mm 160 # Steps per mm for y stepper
gamma_steps_per_mm 160 # Steps per mm for z stepper
extruder.hotend.steps_per_mm 245